
Aim
|
The desire to do this project was to implement the study of kinematics and dynamics on hardware, to understand the difference between theory and practical and to study about robotic systems
|
What is a biped?
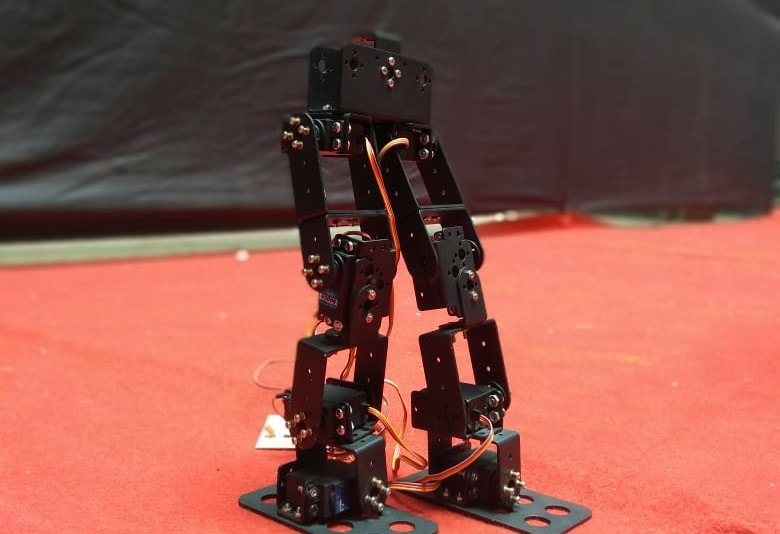
Basically biped is robot which mimics the human like locomotion capabilities. Biped robot has two legs ( like Human ).
Basic Requirements:
Before designing the system, study of kinematics of human walking and earlier developed biped robot has been done. This helped in the way to find out the degrees of freedom required for the robot.
This robot has 8 degrees of freedom with 4 dof for each leg.
Study of kinematics helped me to find about the torque or motor ratings required for each joint and it helped me for the design of my robust hardware.
Basically biped is robot which mimics the human like locomotion capabilities. Biped robot has two legs ( like Human ).
Basic Requirements:
Before designing the system, study of kinematics of human walking and earlier developed biped robot has been done. This helped in the way to find out the degrees of freedom required for the robot.
This robot has 8 degrees of freedom with 4 dof for each leg.
Study of kinematics helped me to find about the torque or motor ratings required for each joint and it helped me for the design of my robust hardware.
|
|
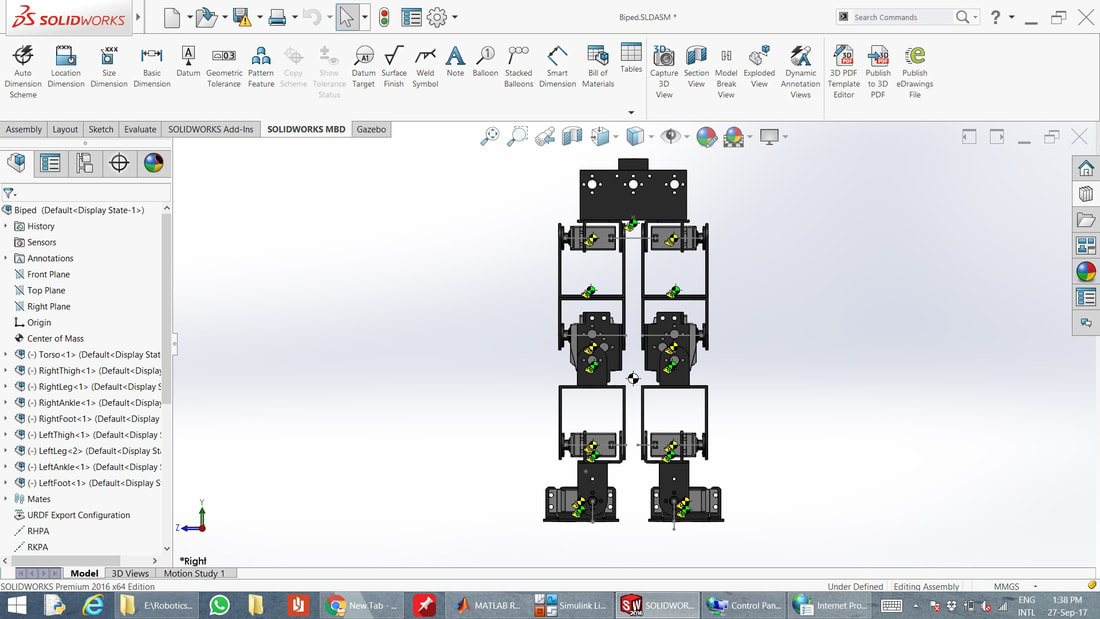
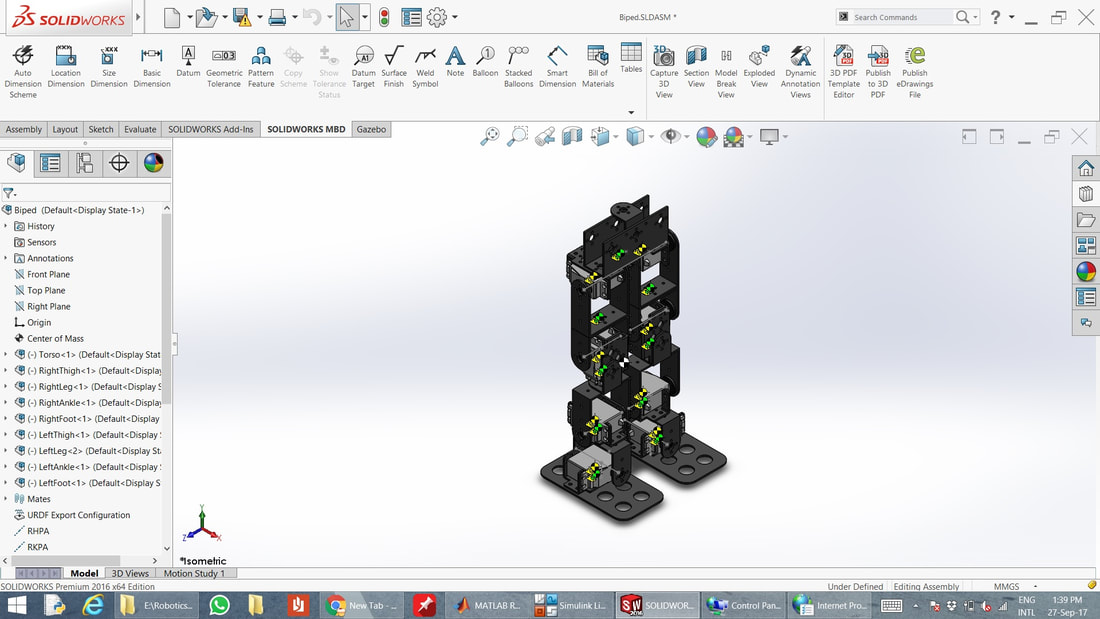
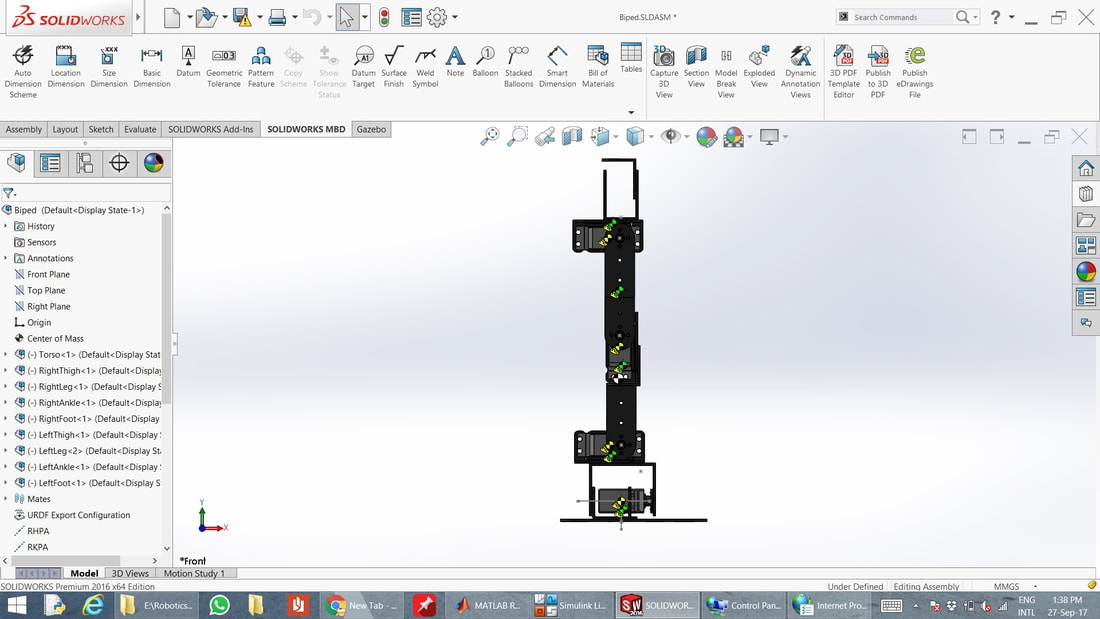
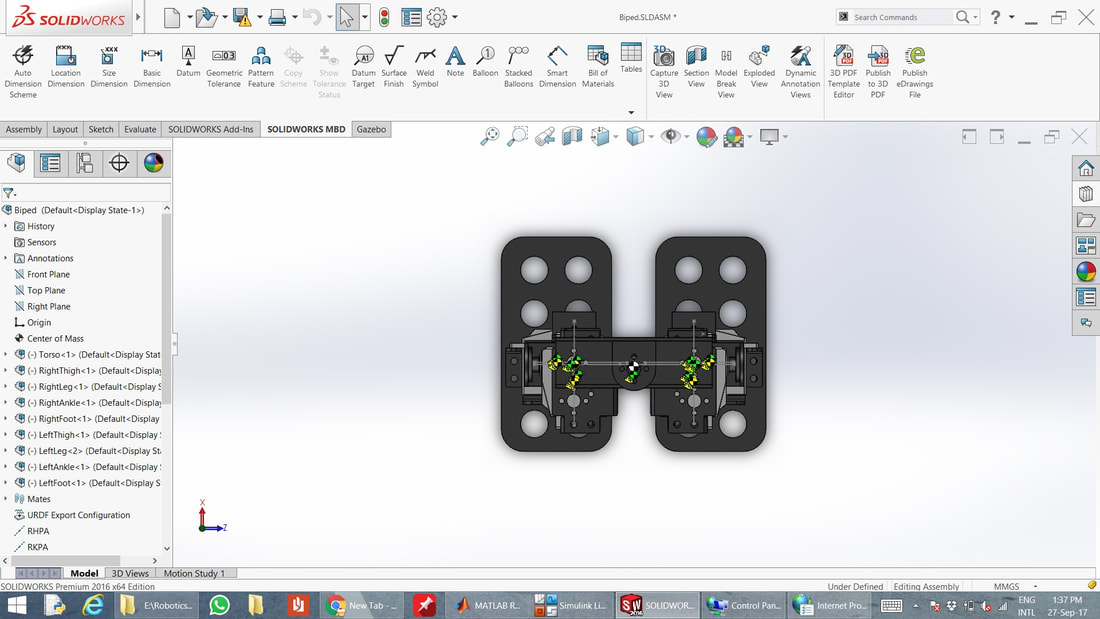
CAD Design
|
|
|
|
Fabrication

|

|

|
|

|
Simulation
|
|
|
Gait Cycle Using Simulation
|
|
Codes & Literature Study
Code to Find COM of Biped (MATLAB)
|
Kinematics and Dynamics of Biped
| ||||
