Research Experience
|
Learning3D: A Modern Library for Deep Learning on 3D Point Clouds Data
Learning3D is an open-source library that supports the development of deep learning algorithms that deal with 3D data. The Learning3D exposes a set of state of art deep neural networks in python. A modular code has been provided for further development. We welcome contributions from the open-source community. Vinit Sarode |
|
|
MaskNet: A Fully-Convolutional Network to Estimate Inlier Points
This paper presents a fully-convolutional neural network that identifies which points in one point cloud are most similar (inliers) to the points in another. Vinit Sarode, Animesh Dhagat, Rangaprasad Arun Srivatsan, Nicolas Zevallos, Simon Lucey, Howie Choset In proceedings of IEEE International Conference on 3D Vision (3DV 2020). |
|
|
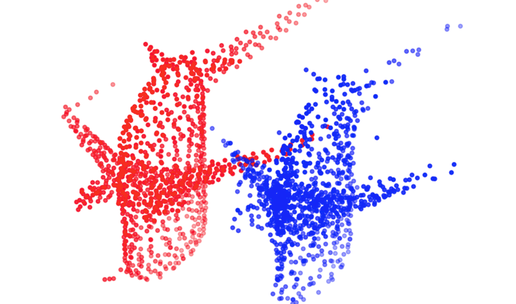
Correspondence Matrices are Underrated (CMU)
This work hypothesizes that correspondence is more robust parameter for point cloud registration than transformation. Tejas Zodage, Rahul Chakwate, Vinit Sarode, Rangaprasad Arun Srivatsan, Howie Choset In proceedings of IEEE International Conference on 3D Vision (3DV 2020). |
|
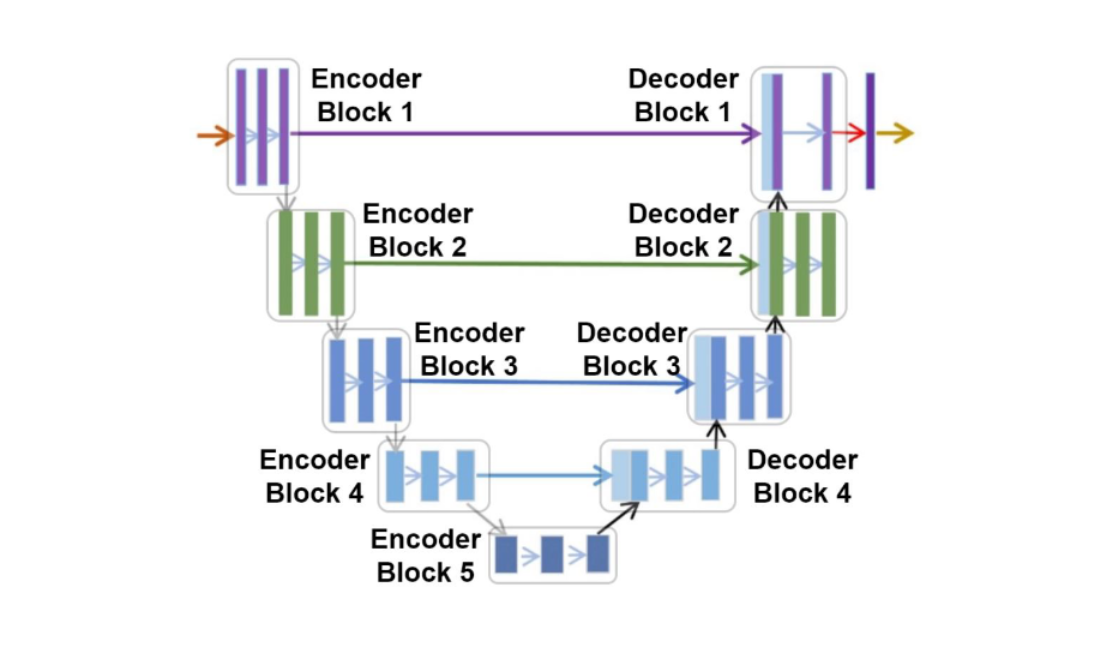
A Study of Domain Generalization on Ultra-sound based Multi-Class Segmentation using Transfer Learning
Study of transfer learning by fine-tuning the encoder and the decoder part of UNet for multi-class segmentation of arteries, veins, ligaments and nerves. Edward Chen, Tejas Sudarshan Mathai, Vinit Sarode, Howie Choset, John Galeotti In Proceedings of Machine Learning for Health Workshop, NeurIPS 2020. |
|
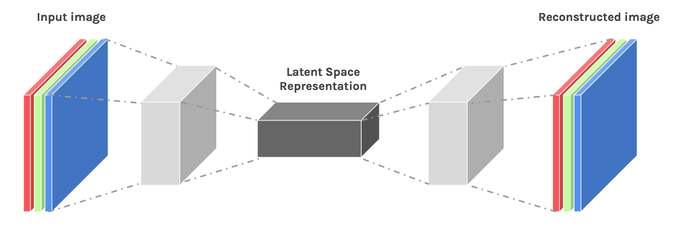
One Framework to Register Them All: PointNet Encoding for Point Cloud Alignment
A single point cloud alignment framework that compares PointNet representation using fully connected layers or Lucas-Kanade algorithm. Vinit Sarode, X.Li, H. Goforth, Y. Aoki, A. Dhagat, R. A. Srivatsan, Simon Lucey, Howie Choset arXiv preprint arXiv:1912.05766 |
|
|
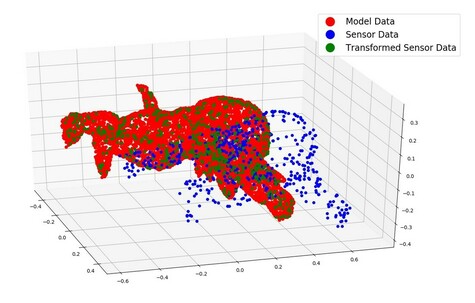
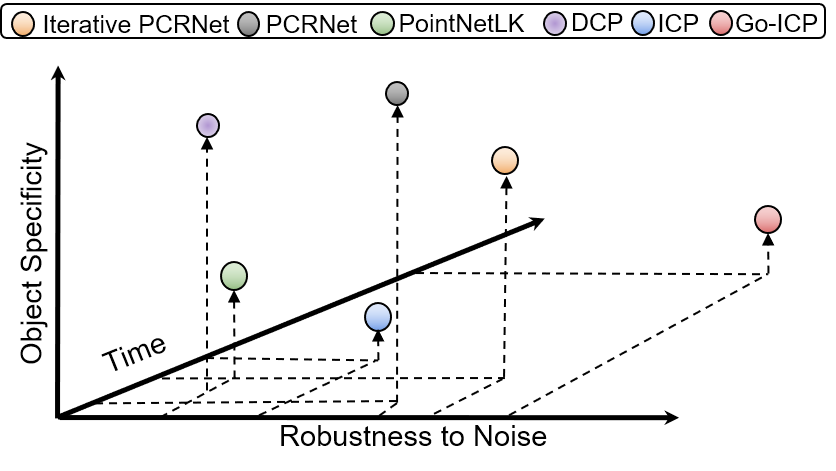
PCRNet: Point Cloud Registration Network using PointNet Encoding
A novel network that uses the PointNet representation to align point clouds and perform registration for applications such as tracking, 3D reconstruction and pose estimation. Vinit Sarode, Xueqian Li, Hunter Goforth, Yasuhiro Aoki, Rangaprasad Arun Srivatsan, Simon Lucey, Howie Choset arXiv preprint arXiv:1908.07906 |
|
|
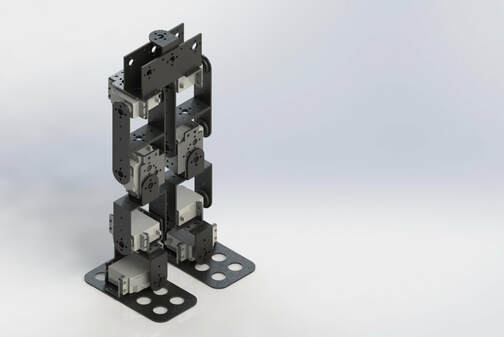
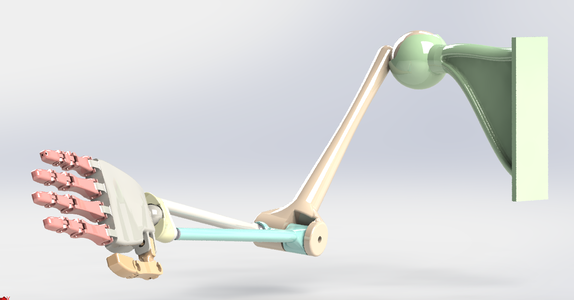
Self-Reconfigurable Transformer Robot
Development of a robust, self-assembling multi-snake modular robot capable of demonstrating abilities of snake robots and legged robots to traverse any terrain with optimum efficiency. Sapan Agrawal, Vinit Sarode, Shalini Addepalli, Yogesh Phalak, Rajeshree Deotalu, Rohan Thakkar, Shital Chiddarwar Poster Presentation at International Conference on Robotics and Automation (ICRA 2018) |
Reinforcement Learning
|
|
Learn Snake Gait using Proximal Policy Optimization (PPO)
Implementation of PPO algorithm to find a policy for the slithering motion of snake robot. Developed an entire simulation in Pybullet and gym environment to implement reinforcement learning algorithms on Snake Robot from the Biorobotics Lab at Carnegie Mellon University. [Note: We are still working on the environment. Will soon release the code.] |