
Problem Statement
Registration is finding an alignment between given Point Clouds or Images or Models.
|
Why this problem is difficult?
Generally this problem is solved to find the misalignment/local transformation between the 3D Point Clouds obtained from a sensor and a CAD model. Major part of solving this problem is finding correspondences between sensor data and model data. Correspondence means finding which point of sensor data belongs to each point in model data. Finding the correspondences is the most difficult part in Registration problem. This is because every sensor (like Kinect, Camera, Lidars) has noise in the data. Also, there are outliers in the sensor data which makes it more difficult. |
Algorithm
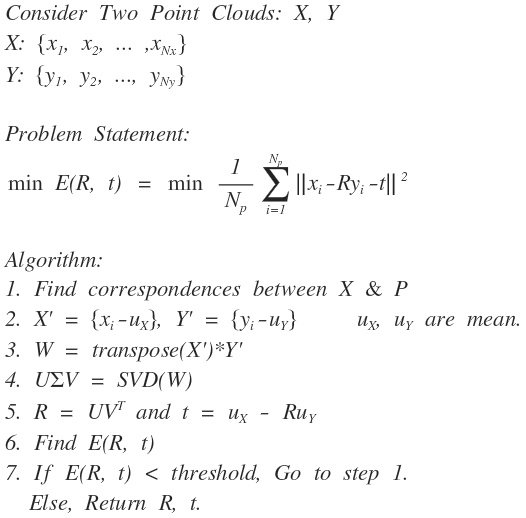
|
Implementation & Result
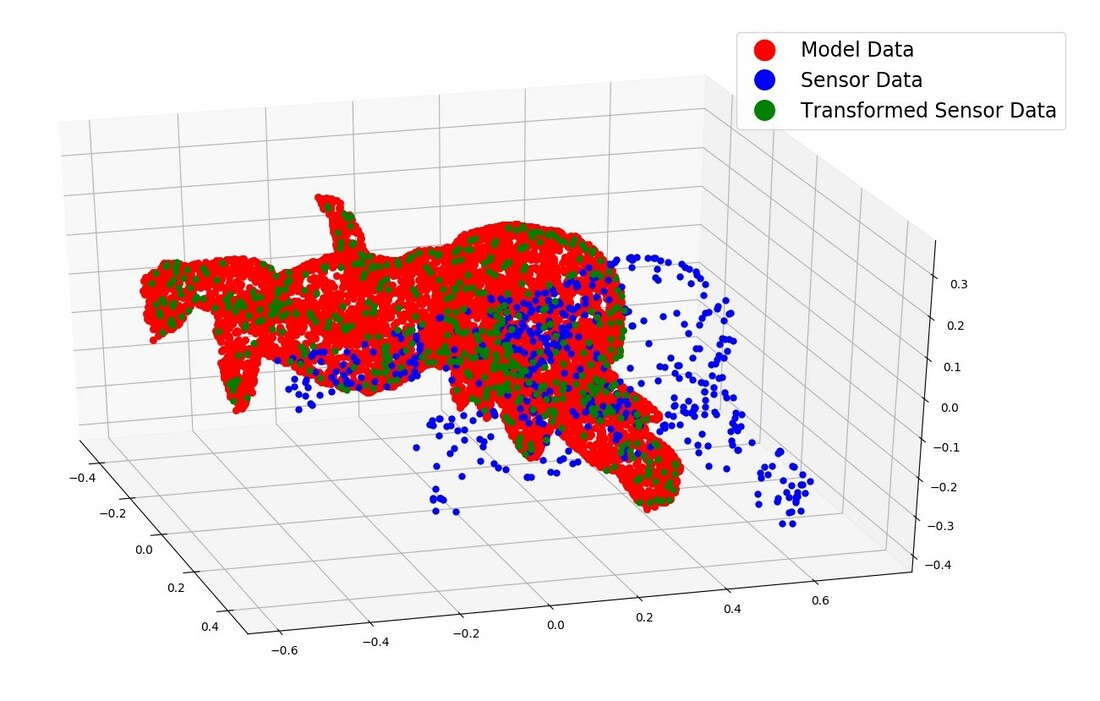
I have used Nearest Neighbour algorithm of KD-Tree to find the correspondences. You can find the implementation on my Github Link.
