Problem Statement
|
PointNet paper has shown an innovative way to deal with raw 3D point clouds. The networks takes x,y & z co-ordinates as the input and processes them to find a feature vector for the classification. Instead of classification, we are trying to reconstruct the point cloud using this feature. Its an attempt to find a latent space where we can encode the information of 3D Point Cloud and use these vectors to reconstruct the original 3D Point Cloud.
|
Network Structure

Results
|
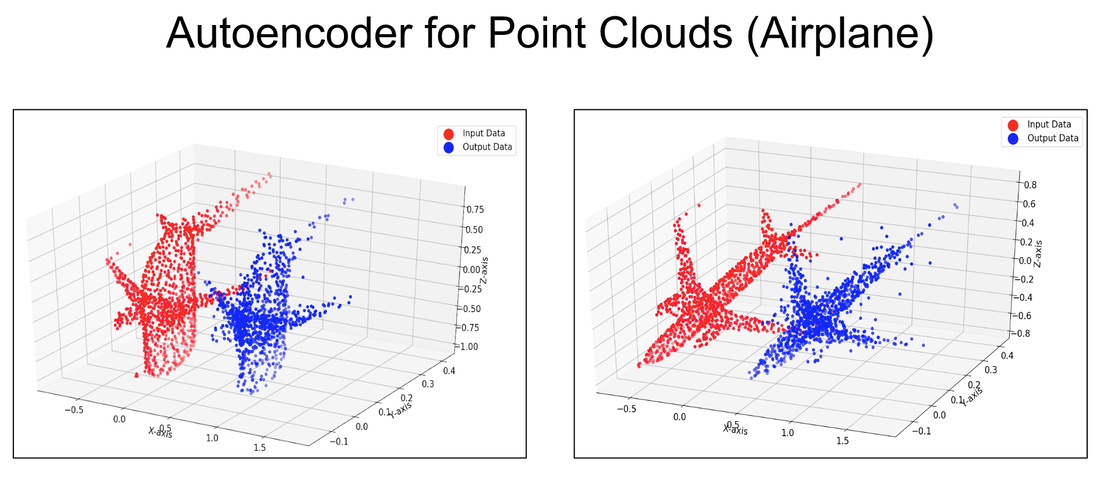
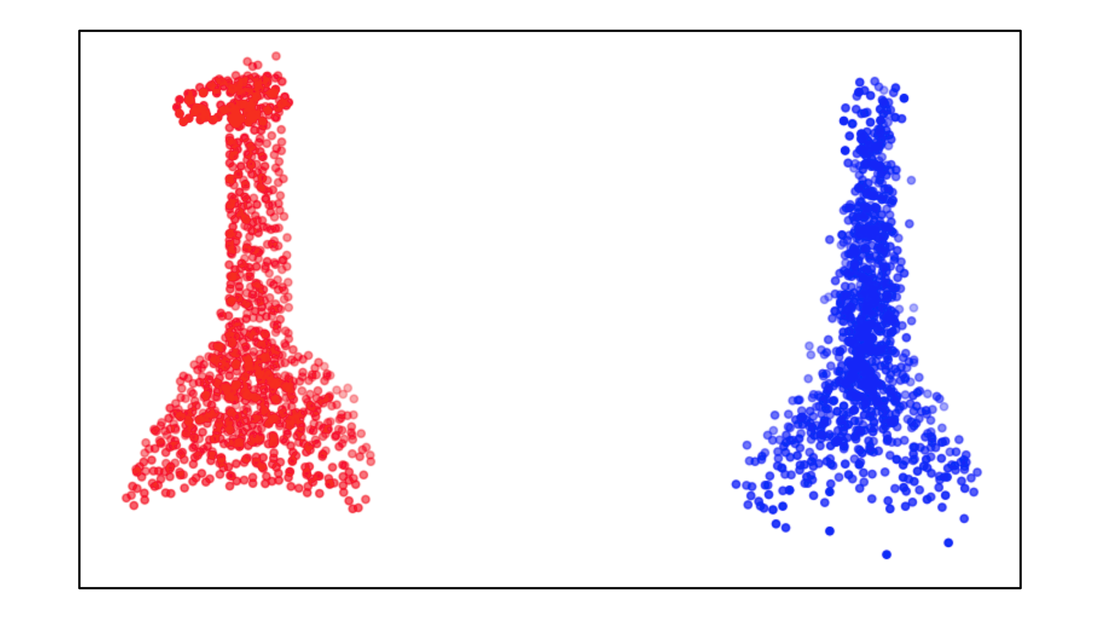
Red colored point clouds are input to the network and blue point clouds are the output.
[Note: A translation has been applied to blue point clouds during testing for a better visualisation purpose.] |